使用cv2进行图像匹配
本节介绍cv2在python中的安装,及其读取、显示、保存图片功能用法。
🔻 安装cv2
利用pip3 install 安装
pip3 install opencv-python安装成功:
😮 题外话 Begin
为什么我使用pip安装时候是使用国内镜像呢?其实只需要配置一个文件即可实现默认使用国内源。在Windows系统下的具体操作如下:
- 在用户目录“C:/Users/用户名”中创建一个名为“pip”的文件夹
- 在“pip”文件夹中新建文件“pip.ini”
- 在“pip.ini”文件中写入一下内容并保存
[global] index-url=https://pypi.tuna.tsinghua.edu.cn/simple [install] trusted-host=pypi.tuna.tsinghua.edu.cn disable-pip-version-check = true timeout = 6000 - 之后使用pip安装的库都会默认下载清华国内源啦
😮 题外话 Over
现在,我们可以在python3中导入cv2这个库了。
import cv2👀 读取、显示、保存图像
参考:https://blog.csdn.net/qq_42079689/article/details/102535329
读取图像 cv2.imread(filepath,flags)
- filepath:读入图像路径(索引地址)
- flags:用于指定以什么样的格式来读取图像
- flags = 1 / cv2.IMREAD_UNCHANGED:采用保持原始格式的方式读取图像。默认参数。
- flags = 2 / cv2.IMREAD_GRAYSCALE:以灰度图像格式读取图像。无论原始图像原来是什么格式,读取后都的结果都转变为灰度图像。
- flags = 3 / cv2.IMREAD_COLOR:以BGR格式读取图像。无论原始图像原来是什么格式,读取后都的结果都转变为BGR形式的三通道图像。
需要特别注意的是:cv2.imread()函数读取RGB图像时,返回的图像格式的通道并不是按R、G、B排列的,而是按B、G、R顺序排列的。
显示图像 cv2.imshow(wname,img)
- wname:显示窗口的名字
- img:需要显示的图像(使用imread读入)
保存图像 cv2.imwrite(file,img,num)
file:要保存的文件名
img:需要保存的图像(使用imread读入)
num:可选参数,针对特定的格式:对于JPEG,其表示的是图像的质量,用0 - 100的整数表示,默认95;对于png 第三个参数表示的是压缩级别,默认为3。
- cv2.IMWRITE_JPEG_QUALITY类型为 long ,必须转换成 int
- cv2.IMWRITE_PNG_COMPRESSION, 从0到9 压缩级别越高图像越小
实例
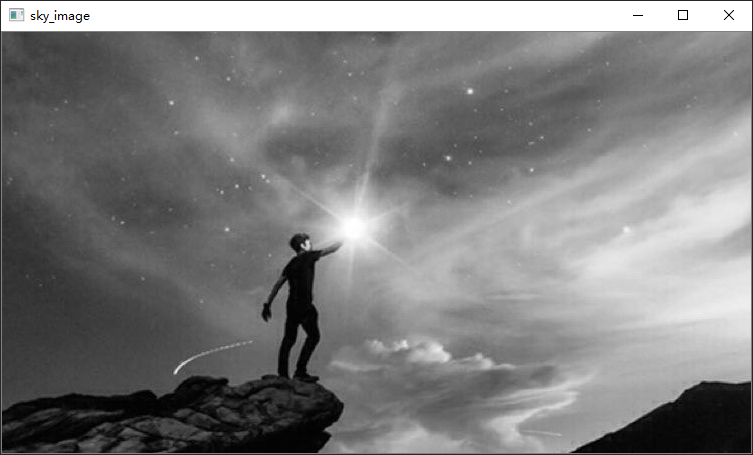
以“sky.jpg”图片为例进行图像读取、显示及保存。
# -*- coding:utf-8 -*-
import cv2
# ! 读入一张图像,读取方式为灰度模式
img = cv2.imread('sky.jpg',cv2.IMREAD_GRAYSCALE)
# ! 显示读入的图像,并设置窗口名为“sky_image”
cv2.imshow('sky_image',img)
# ! 等待键盘输入,单位为毫秒,即等待指定的毫秒数看是否有键盘输入
# ! 若在等待时间内按下任意键则返回按键的ASCII码,程序继续运行。若没有按下任何键,超时后返回-1。参数为0表示无限等待。
# ! 不调用waitKey的话,窗口会一闪而逝,看不到显示的图片。
cv2.waitKey(0)
# ! 销毁指定窗口
cv2.destroyWindow('sky_image')
# ! 销毁所有窗口
# cv2.destroyAllWindow()
# ! 保存图像
cv2.imwrite('sky_1.jpeg',img, [int( cv2.IMWRITE_JPEG_QUALITY), 95])
cv2.imwrite('sky_2.png',img, [int(cv2.IMWRITE_PNG_COMPRESSION), 9])运行后显示图片:
运行结束后保存图片:
🎆 翻转、复制、颜色空间转换图像
参考:https://blog.csdn.net/djcxym/article/details/52097812
翻转图像 cv2.flip(img,flipcode)
- img:需要翻转的图像(使用imread读入)
- flipcode:控制翻转效果
- flipcode = 0:沿x轴翻转
- flipcode > 0:沿y轴翻转
- flipcode < 0:x,y轴同时翻转
# ! 翻转图像
img = cv2.flip(img,0)复制图像 cv2.flip(img,flipcode)
imgcopy = img.copy()颜色空间转化 cv2.flip(img,flipcode)
# 彩色图像转为灰度图像
img2 = cv2.cvtColor(img,cv2.COLOR_RGB2GRAY)
# 灰度图像转为彩色图像
img3 = cv2.cvtColor(img,cv2.COLOR_GRAY2RGB)
# cv2.COLOR_X2Y,其中X,Y = RGB, BGR, GRAY, HSV, YCrCb, XYZ, Lab, Luv, HLS🔍 图像匹配
参考:https://blog.csdn.net/zhusongziye/article/details/93393725
模版匹配 cv2.matchTemplate()
在模板和输入图像之间寻找匹配,获得匹配结果图像。
模板匹配具有自身的局限性,主要表现在它只能进行平行移动,若原图像中的匹配目标发生旋转或大小变化,该算法无效。
其中模板匹配的算法:
- 利用平方差来进行匹配,最好匹配为0。匹配越差,匹配值越大。
- 平方差匹配:CV_TM_SQDIFF
- 标准平方差匹配:CV_TM_SQDIFF_NORMED
- 采用模板和图像间的乘法操作,得出数值越大表示匹配程度较高,0为最坏匹配。
- 相关匹配:CV_TM_CCORR
- 标准相关匹配:CV_TM_CCORR_NORMED
- 将模版对其均值的相对值与图像对其均值的相关值进行匹配,1表示完美匹配,-1表示糟糕的匹配,0表示没有任何相关性(随机序列)。
- 相关系数匹配:CV_TM_CCOEFF
- 标准相关系数匹配:CV_TM_CCOEFF_NORMED
标准化意味着将数值统一到0~1。除了平方差类型的是值越小越好,其他的都是值越大越好。
找出矩阵最大值和最小值的位置 cv2.minMaxLoc()
在给定的矩阵中寻找最大和最小值,并给出它们的位置。
实例
# -*- coding:utf-8 -*-
import cv2
# ! 读取匹配图像
img = cv2.imread('sky.jpg',1)
# ! 读取模版图像
temple = cv2.imread('people.png',1)
# ! 获取匹配图像的宽高
ih, iw = img.shape[:2]
# ! 获取模版图像的宽高
th, tw = temple.shape[:2]
# ! 使用标准相关系数匹配,返回一个矩阵
result = cv2.matchTemplate(img, temple, cv2.TM_CCOEFF_NORMED)
# ! 获取矩阵的最大值和最小值,以及其位置
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(result)
# ! 此处选取最大值的位置,即匹配结果图像的左上角
tl = max_loc
# ! 根据模版大小,得出匹配结果图像的右下角
br = (tl[0]+tw, tl[1]+th)
# ! 绘制矩形框
cv2.rectangle(img, tl, br, (0, 0, 255), 2)
# ! 显示匹配结果窗口
cv2.namedWindow('match', 0)
cv2.resizeWindow('match', iw, ih)
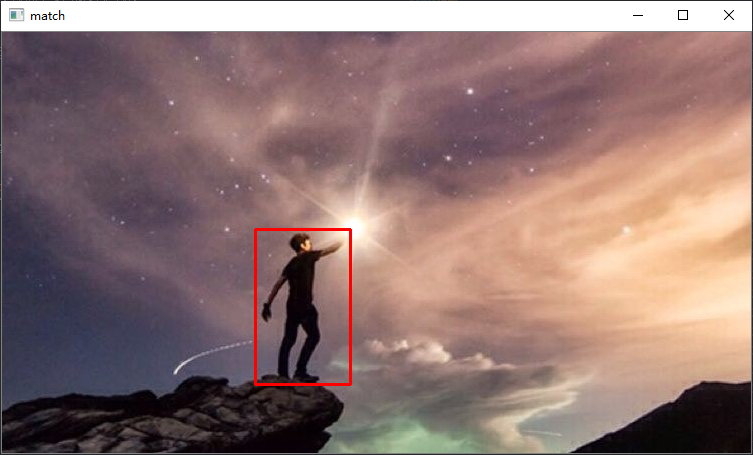
cv2.imshow('match', img)
cv2.waitKey(0)图像显示的匹配结果:
本博客所有文章除特别声明外,均采用 CC BY-SA 4.0 协议 ,转载请注明出处!